Steinmetz-Körper
Steinmetz-Körper wurden von dem deutsch-amerikanischen Ingenieur Charles Steinmetz entdeckt. Er wirkte Ende des 18. und Anfang des 19. Jahrhunderts.
Ein Steinmetz-Körper ist der Schnitt von zwei oder drei Zylindern, deren Achsen senkrecht aufeinander stehen. Diese Körper werden auch Bizylinder bzw. Trizylinder genannt.
Dies sind die einzigen Steinmetz-Körper in drei Dimensionen, da man maximal drei zueinander senkrechte Achsen konstruieren kann. In Räumen mit einer höheren Dimension n kann man jedoch Steinmetz-Körper konstruieren, die aus bis zu n Zylindern bestehen.
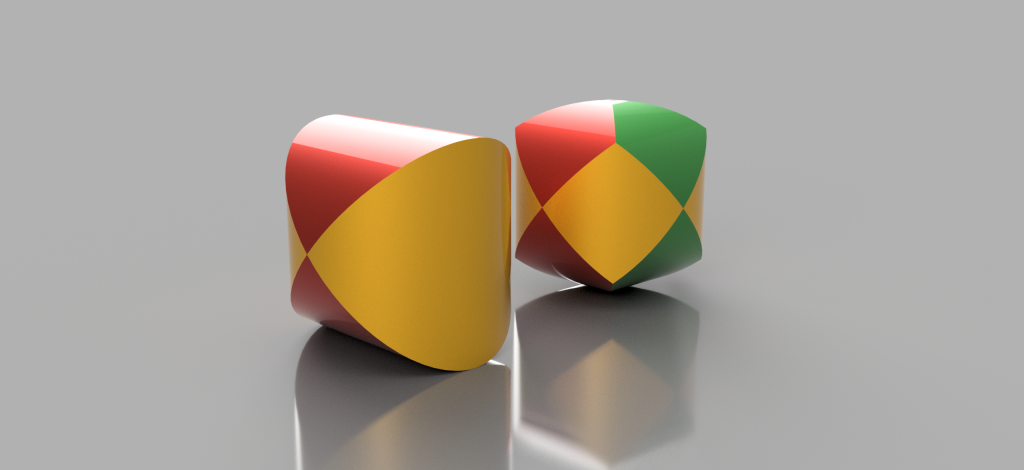
Zwei Steinmetz-Köper. Links sieht man den Schnitt zweier Zylinder (Bizylinder), rechts sieht man den Schnitt dreier Zylinder (Trizylinder). 
3D-gedruckter Bizylinder und Trizylinder
Rollende Steinmetz-Körper
Steinmetz-Körper haben ein interessantes Verhalten, wenn sie rollen. Sie können ausschließlich in die Richtungen rollen, die den Rundungen der Zylinder folgen, aus denen sie bestehen.
Rollende Objekte besitzen häufig (aber nicht notwendigerweise, wie z.B. der Oloid) eine glatte Rotationssymmetrie. Zylinder sind rotationssymmetrisch bezüglich ihrer Hauptachse.
In der Mathematik beschreiben wir Symmetrien häufig mit sogenannten Gruppen. Ein vollständig rotationssymmetrisches Objekt ist invariant unter der Wirkung der Gruppe SO(3), wohingegen die Untergruppe SO(2) die Rotationssymmetrie in Bezug auf eine Achse beschreibt. Ein Zylinder ist also invariant unter Wirkung der SO(2). Eine genauere Analyse zeigt, dass der Körper entlang der Achse rollen kann, die von dieser Wirkung fixiert wird.
Interessanterweise muss der Schnitt zweier rotationssymmetrischer Körper nicht notwendigerweise rotationssymmetrisch sein. So ist der Bizylinder z.B. nicht glatt rotationssymmetrisch: Wenn wir ihn um einen kleinen Winkel rotieren, sieht er anders aus als zuvor.
Er besitzt jedoch zwei diskrete Symmetrien: Wenn wir ihn entlang einer Achse um 180° rotieren, sieht er genau so aus wie zuvor. Diese Symmetrien entsprechen genau den Rollrichtungen.
In der Sprache der Gruppen handelt es sich um zwei verschiedene Z2-Symmetrien. Der Trizylinder besitzt sogar drei diskrete Z4-Symmetrien, die Rotationen um 90° entsprechen.
Verallgemeinerte Steinmetz-Körper
Wir können das Konzept der Steinmetz-Körper verallgemeinern, indem wir die Voraussetzung weglassen, dass die Zylinder zueinander senkrecht stehen müssen. Zum Beispiel kann man vier Zylinder anordnen, die im Tetraederwinkel von ~109° zueinander stehen.
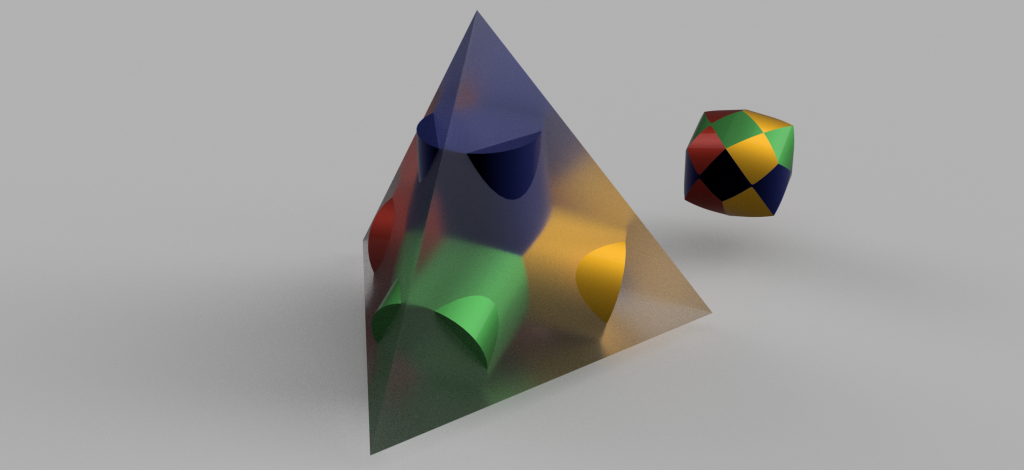
Es ist offensichtlich, dass ein Schnitt von n Zylindern in n verschieden Richtungen rollen kann. Tatsächlich kann man zeigen, dass das Volumen des Schnitts bei steigendem n zum Kugelvolumen konvergiert. Durch Erhöhen der Zahl n der Zylinder erhöhrt sich auch die Zahl der Symmetrien auf n. Zugleich werden die Schrittwinkel der Symmetrien immer kleiner. Insbesondere steigt auch die Zahl m der Symmetriegruppen Zm. So hat der Tetrazylinder z.B. vier Z6-Symmetrien.
Einführung in das Konzept der Dualität
Wie wir zuvor gesehen haben, können wir vier Zylinder so anordnen, dass deren Achsen senkrecht auf den Flächen eines Tetraeders stehen.
Wir können dieses Konzept verallgemeinern, in dem wir Zylinder senkrecht zu den Flächen anderer Polyeder anordnen. Zum Beispiel können wir die zwei einander gegenüberliegenden Oberflächen eines Würfels verbinden, und erhalten den Trizylinder. Tatsächlich kann der Trizylinder aus zwei verschiedenen Polyedern gebildet werden, nämlich dem Würfel (Hexaeder) und dem Oktaeder, in dem man die gegenüberliegenden Ecken verbindet. Diese Beziehung ist beispielhaft für das Konzept der Dualität:
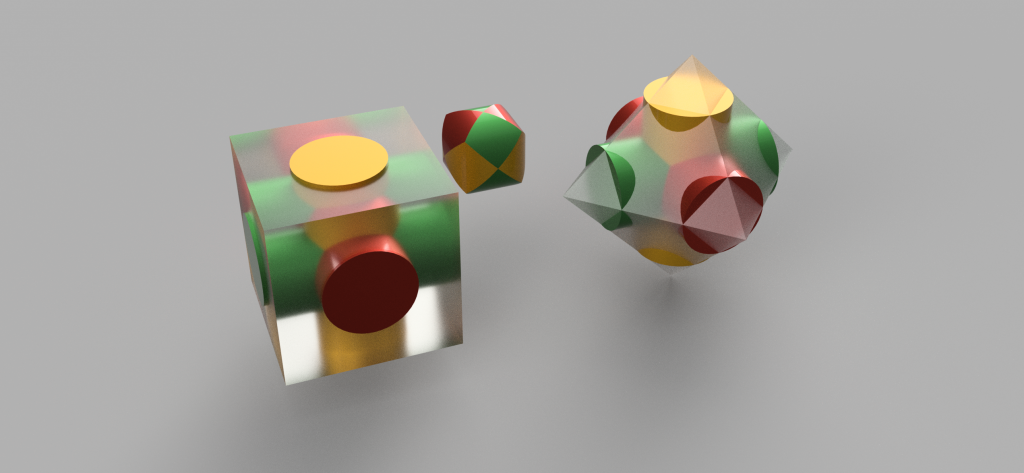
Indem wir eine Ecke einer Fläche zuweisen (und umgekehrt) erhalten wir den dualen Körper.
Das Konzept der Dualität ist sehr bedeutend in der Mathematik. Viele mathematische Objekte haben ein entsprechendes duales Objekt. Häufig ermöglicht deren Beziehung dem Mathematiker, Eigenschaften des ursprünglichen Objekts zu entdecken, indem er das Dual untersucht.
Einige Beispiele für Dualität:
- Logische Aussagen können negiert werden. Die negierte Aussage ist dual zur ursprünglichen. Häufig ist es einfacher, die duale Aussage zu widerlegen, als die ursprüngliche Aussage zu beweisen.
- Für jeden Vektorraum gibt es einen dualen Vektorraum. Dieser ist der Raum der Funktionale auf dem ursprünglichen Raum.
- Ein Graph besteht aus Knoten, die von Kanten verbunden werden. Der duale Graph kann gebildet werden, indem jedem Knoten eine Kante zugewiesen wird und umgekehrt.
Mehr über Steinmetz-Körper (nicht auf der HITS-Webseite):
- Interaktives Programm für Zylinder-Schnitte:
https://demonstrations.wolfram.com/IntersectingCylinders/ - Berechnung von Volumen und Oberflächeninhalt:
http://mathworld.wolfram.com/SteinmetzSolid.html - Schnitte von zufällig ausgerichteten Zylindern:
http://paulbourke.net/geometry/cylinders/